
Ngôn ngữ
 Tiếng Việt
Tiếng Việt
 English
English
 中文 (Chinese)
中文 (Chinese)
 日本語 (Japanese)
日本語 (Japanese)
 한국어 (Korean)
한국어 (Korean)
 ไทย (Thai)
ไทย (Thai)
 Français (French)
Français (French)
 Deutsch (German)
Deutsch (German)
 Español (Spanish)
Español (Spanish)
 Русский (Russian)
Tiếng Việt
English
中文 (Chinese)
日本語 (Japanese)
한국어 (Korean)
ไทย (Thai)
Français (French)
Deutsch (German)
Español (Spanish)
Русский (Russian)
Русский (Russian)
Tiếng Việt
English
中文 (Chinese)
日本語 (Japanese)
한국어 (Korean)
ไทย (Thai)
Français (French)
Deutsch (German)
Español (Spanish)
Русский (Russian)
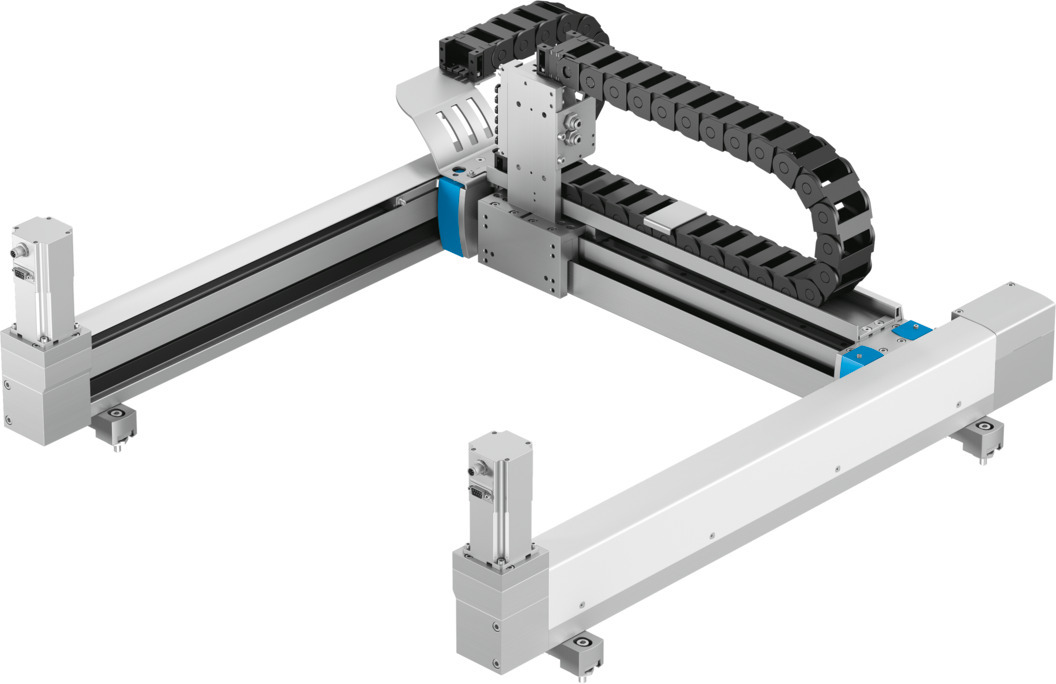
Chức năng cao và thiết kế cực kỳ nhỏ gọn: Bộ truyền động động học song song đảm bảo khối lượng chuyển động thấp và một dấu vết nhỏ. Mức độ tiêu chuẩn hóa cao khiến cho EXCM-30 trở thành giải pháp hệ thống hiệu quả về chi phí cho các tác vụ trên máy tính để bàn, chẳng hạn như lắp ráp các bộ phận nhỏ.
![]()
- Cơ học trục dựa trên nguyên lý hàm động học song song
- Chức năng cao trong không gian lắp đặt nhỏ nhất
- Khối lượng tịnh di chuyển thấp và thiết kế hệ thống phẳng
- Lý tưởng khi kết hợp với các động cơ bước
- Với thanh dẫn hướng cầu tuần hoàn
- Bền vững trong hoạt động nhờ các trục được tối ưu hóa trọng lượng
Có 2 loại sản phẩm:
- Hệ mặt phẳng EXCM-40-

- Hệ mặt phẳng EXCM-30-
| Đặc điểm | Hệ mặt phẳng | Hệ mặt phẳng |
| Sự so sánh | EXCM-40- | EXCM-30- |
| Giá | 0 ₫ | 0 ₫ |
| Logic chuyển mạch đầu ra | NPN (chuyển mạch âm) PNP (chuyển mạch dương) | |
| Mức áp suất âm thanh | 65 dB(A) | 52 dB(A) |
| Nhiệt độ bảo quản | -10 °C ... 60 °C | -10 °C ... 60 °C |
| Mô-men xoắn giữ động cơ | 0.5 N m | |
| Dấu CE (xem tuyên bố về sự phù hợp) | theo Chỉ thị máy móc của EU | theo chỉ thị EMC của EU |
| Tuân thủ LABS | VDMA24364 Vùng III | VDMA24364 Vùng III |
| Kiểu gắn | với bộ gá với bộ điều chỉnh với đai ốc trượt | Bộ gá |
| Mô-men xoắn danh nghĩa | 0.04 N m | |
| Độ ẩm tương đối | 0 - 90 % không cô đặc | 0 - 90 % không cô đặc |
| Mô-men tối đa Mz | 5.5 N m | |
| chuyển đổi đầu vào logic | NPN (chuyển mạch âm) PNP (chuyển mạch dương) | |
| Max. Moment My | 10.9 N m | |
| Điện áp định mức nguồn cấp logic DC | 24 V | |
| Tốc độ tối đa, ngang | 1 m/s | |
| Phạm vi điện áp logic cho phép | ± 15 % | |
| Tăng tốc tối đa ngang | 5 m/s² | |
| Kích thước | 40 | 30 |
| Mức độ bảo vệ | IP40 | IP20 |
| Ghi chú vật liệu | Tuân thủ RoHS | Tuân thủ RoHS |
| Nhiệt độ môi trường xung quanh | 10 °C ... 50 °C | 10 °C ... 45 °C |
| Dấu UKCA (xem tuyên bố về sự phù hợp) | theo quy định của Vương quốc Anh đối với máy móc | theo quy định UK cho EMV |
| Kiểu vận hành bộ điều khiển | Giai đoạn đầu ra công suất PWM MOSFET Bộ điều chỉnh theo tầng với Bộ điều chỉnh vị trí P Bộ điều chỉnh tốc độ PI Bộ điều chỉnh dòng PI | |
| Cấu trúc xây dựng | Cổng dẹt | Cổng dẹt |
| Thời điểm tối đa Mx | 5.5 N m | |
| Giao diện giao tiếp | FHPP | |
| Lực quá trình tối đa theo hướng Z | 100 N | |
| Nạp liệu không đổi | 38 mm/vòng | |
| Mô-men truyền động cực đại | 0.2 N m | |
| Đặc điểm kỹ thuật đầu vào logic | dựa trên IEC 61131-2 | |
| Bộ cảm biến vị trí | Bộ mã hóa | |
| Điện áp danh nghĩa Nguồn cung cấp tải DC | 24 V ... 48 V | |
| Chức năng an toàn | Mô-men tắt an toàn (STO) | |
| Độ chính xác lặp lại | ±0,1 mm | ±0,05 mm |
| Giao diện tham số hóa | Ethernet | |
| Bộ lọc nguồn | tích hợp | |
| quá trình khớp nối | Khớp nối I/O cho 31 bộ | |
| Hành trình trục Y | 200 mm ... 1000 mm | |
| Thời gian bật | 100% | 100% |
| Hiển thị | 7 đoạn Đèn LED | |
| Đầu ra logic kỹ thuật số tối đa hiện tại | 100 mA | |
| Hành trình trục X | 200 mm ... 2000 mm | |
| Số đầu ra logic kỹ thuật số 24 V DC | 5 | |
| Đặc tính của đầu ra logic kỹ thuật số | không bị cách điện | |
| Giao diện giao tiếp logic | CAN DS 301 E/A 31pos Ethernet - TCP/IP | |
| Chế độ vị trí | Ghi chế độ lựa chọn Vượt qua vị trí trực tiếp | |
| Điều chỉnh vị trí | có | |
| Ethernet, các giao thức được hỗ trợ | TCP/IP | |
| Giá trị tham chiếu tải định mức, theo chiều dọc | 2 kg | |
| Tải trọng định mức với động học tối đa | 4 kg | |
| Gia tốc tối đa cho phép, cơ học thuần túy | 20 m/s² | |
| Điện trở phanh | 15 Ohm | |
| Tốc độ tối đa cho phép, cơ học thuần túy | 2 m/s | |
| Chế độ vận hành | Bước nhỏ, 2000 bước/vòng quay | |
| Tăng tốc tối đa | 10 m/s² ... 20 m/s² | |
| Tốc độ tối đa | 0.5 m/s ... 1 m/s | |
| Lực tối đa Fz | 1345 N | |
| Số lượng đầu vào logic kỹ thuật số | 8 | |
| Loại động cơ | Động cơ bước | Động cơ bước |
| Áp suất vận hành | ≤8 bar | |
| Đặc tính đầu vào logic | kết nối điện với điện thế logic | |
| Vị trí lắp đặt | ngang | bất kì |
| Giá trị tham chiếu tải trọng định mức, theo chiều ngang | 3 kg | |
| Vùng làm việc đầu vào logic | 24 V | |
| Chức năng bảo vệ | Giám sát I²t Kiểm soát nhiệt độ Theo dõi dòng điện Phát hiện mất điện Giám sát lỗi kéo Phát hiện vị trí cuối phần mềm | |
| Kiểu nội suy | Phép nội suy tuyến tính |







